 |
ROC++
v1.2
Automatic Robust Optimization in C++
|


|
|
ROC++
v1.2
Automatic Robust Optimization in C++
|
|
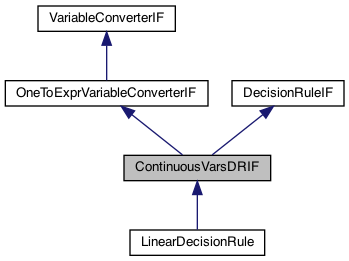
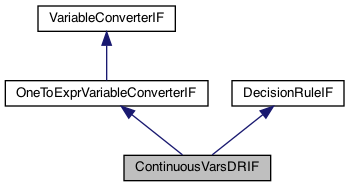
Continous variable decision rule interface class. More...
#include <DecisionRule.hpp>
Public Member Functions | |
| ContinuousVarsDRIF (uint memory=1000) | |
| Constructor of the continuous variable decision rule interface class. More... | |
| virtual | ~ContinuousVarsDRIF () |
| Destructor of the continuous variable decision rule interface class. More... | |
| void | findVarsToTranslate (vector< ROCPPConstraintIF_Ptr >::const_iterator first, vector< ROCPPConstraintIF_Ptr >::const_iterator last, ROCPPObjectiveIF_Ptr obj, dvContainer &container) |
| Find all adaptive continuous variable in the given constraints and objective. More... | |
 Public Member Functions inherited from OneToExprVariableConverterIF Public Member Functions inherited from OneToExprVariableConverterIF | |
| OneToExprVariableConverterIF () | |
| Constructor of OneToExprVariableConverterIF class. More... | |
| ~OneToExprVariableConverterIF () | |
| Destructor of OneToExprVariableConverterIF class. More... | |
| const_iterator | find (string varName) const |
| const_iterator | begin () const |
| const_iterator | end () const |
| void | convertVar (vector< ROCPPConstraintIF_Ptr >::const_iterator first, vector< ROCPPConstraintIF_Ptr >::const_iterator last, ROCPPObjectiveIF_Ptr obj, const dvContainer &origDVContainer, vector< ROCPPConstraintIF_Ptr > &toAdd, ROCPPObjectiveIF_Ptr &toSet, bool resetAndSave=false) |
| Map the original variable to an expression for all variables in the input model. More... | |
| virtual void | createTranslationMap (const dvContainer &tmpContainer, map< string, ROCPPExpr_Ptr > &translationMap, vector< ROCPPConstraintIF_Ptr > &toAdd)=0 |
| Create m_translationMap for the variables in the given container. More... | |
| virtual void | createInverseMap (const dvContainer &origDVContainer) |
| Create the map m_inverseMap. More... | |
| double | evaluateVariableValue (string nme, const map< string, double > &binValuesMap) const |
| Evaluate and return the value of the given variable after converting it. More... | |
| virtual ROCPPOptModelIF_Ptr | convertVar (ROCPPOptModelIF_Ptr pIn, bool resetAndSave=false) |
| Get the objective and constraints in the input model and then convert the variables. More... | |
| virtual void | convertVar (vector< ROCPPConstraintIF_Ptr >::const_iterator first, vector< ROCPPConstraintIF_Ptr >::const_iterator last, ROCPPObjectiveIF_Ptr obj, const dvContainer &origDVContainer, vector< ROCPPConstraintIF_Ptr > &toAdd, ROCPPObjectiveIF_Ptr &toSet, bool resetAndSave=false)=0 |
| Approximate each variable in the given objective and contraints. More... | |
| Public Member Functions inherited from VariableConverterIF | |
| VariableConverterIF () | |
| Constructor of VariableConverterIF class. More... | |
| ~VariableConverterIF () | |
| Destructor of VariableConverterIF class. More... | |
| const_iterator_inv | findInv (string varName) const |
| Return a constant iterator pointing to the pair of the given variable and the old variable associated with it. More... | |
| const_iterator_inv | beginInv () const |
| Return a constant iterator pointing to the beginning of the inverse map (m_inverseMap) More... | |
| const_iterator_inv | endInv () const |
| Return a constant iterator pointing to the end of the inverse map (m_inverseMap) More... | |
| virtual ROCPPOptModelIF_Ptr | convertVar (ROCPPOptModelIF_Ptr pIn, bool resetAndSave=false) |
| Get the objective and constraints in the input model and then convert the variables. More... | |
| virtual void | convertVar (vector< ROCPPConstraintIF_Ptr >::const_iterator first, vector< ROCPPConstraintIF_Ptr >::const_iterator last, ROCPPObjectiveIF_Ptr obj, const dvContainer &origDVContainer, vector< ROCPPConstraintIF_Ptr > &toAdd, ROCPPObjectiveIF_Ptr &toSet, bool resetAndSave=false)=0 |
| Approximate each variable in the given objective and contraints. More... | |
| virtual void | findVarsToTranslate (vector< ROCPPConstraintIF_Ptr >::const_iterator first, vector< ROCPPConstraintIF_Ptr >::const_iterator last, ROCPPObjectiveIF_Ptr obj, dvContainer &container)=0 |
| Find the variable in the given ocnstraints and objective to be mapped and store them in the container. More... | |
| virtual void | printOut (const ROCPPOptModelIF_Ptr pIn, const map< string, double > &variableValue, ROCPPVarIF_Ptr dv) |
| Print the solution of the given decision variable. More... | |
| Public Member Functions inherited from DecisionRuleIF | |
| DecisionRuleIF (uint memory=1000) | |
| Constructor of the DecisionRuleIF class. More... | |
| virtual | ~DecisionRuleIF () |
| Destructor of the DecisionRuleIF class. More... | |
| uint | getMemory () const |
| virtual ROCPPOptModelIF_Ptr | approximate (ROCPPOptModelIF_Ptr pIn)=0 |
Additional Inherited Members | |
| Public Types inherited from OneToExprVariableConverterIF | |
| typedef map< string, ROCPPExpr_Ptr >::const_iterator | const_iterator |
| Public Types inherited from VariableConverterIF | |
| typedef map< string, ROCPPVarIF_Ptr >::const_iterator | const_iterator_inv |
| Constant iterator into inverse map. More... | |
| Protected Attributes inherited from OneToExprVariableConverterIF | |
| map< string, ROCPPExpr_Ptr > | m_translationMap |
| Map from name of the original variable to the expression. More... | |
| Protected Attributes inherited from VariableConverterIF | |
| map< string, ROCPPVarIF_Ptr > | m_inverseMap |
| Map from the new variable name to old variable. More... | |
| Protected Attributes inherited from DecisionRuleIF | |
| uint | m_memory |
| Memory of this approximator. More... | |
Continous variable decision rule interface class.
|
inline |
Constructor of the continuous variable decision rule interface class.
|
inlinevirtual |
Destructor of the continuous variable decision rule interface class.
| void ContinuousVarsDRIF::findVarsToTranslate | ( | vector< ROCPPConstraintIF_Ptr >::const_iterator | first, |
| vector< ROCPPConstraintIF_Ptr >::const_iterator | last, | ||
| ROCPPObjectiveIF_Ptr | obj, | ||
| dvContainer & | container | ||
| ) |
Find all adaptive continuous variable in the given constraints and objective.