 |
ROC++
v1.2
Automatic Robust Optimization in C++
|


|
|
ROC++
v1.2
Automatic Robust Optimization in C++
|
|
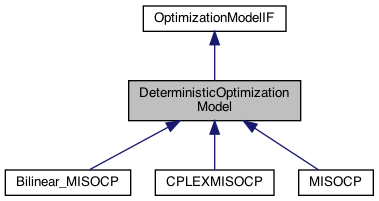
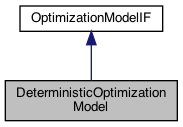
Deterministic optimization model. More...
#include <OptimizationModel.hpp>
Public Member Functions | |
| DeterministicOptimizationModel () | |
| Constructor of the DeterministicOptimizationModel class. More... | |
| ~DeterministicOptimizationModel () | |
| Destructor of the DeterministicOptimizationModel class. More... | |
| void | checkCompatibility (ROCPPConstraintIF_Ptr pConstraint) const |
| void | checkCompatibility (ROCPPVarIF_Ptr pVariable) const |
| void | checkCompatibility (ROCPPObjectiveIF_Ptr pObjFun) const |
| problemType | getType () const |
| Return the problem type. More... | |
 Public Member Functions inherited from OptimizationModelIF Public Member Functions inherited from OptimizationModelIF | |
| OptimizationModelIF (uint numTimeStages=1) | |
| Constructor of OptimizationModelIF. More... | |
| virtual | ~OptimizationModelIF () |
| Destructor of OptimizationModelIF. More... | |
| constraintIterator | constraintBegin () const |
| Return a constant iterator pointing to the beginning of the constraint vector. More... | |
| constraintIterator | constraintEnd () const |
| Return a constant iterator pointing to the end of the constraint vector. More... | |
| varsIterator | varsBegin () const |
| Return a constant iterator pointing to the beginning of the decision variable map (m_pDVContainer) More... | |
| varsIterator | varsEnd () const |
| Return a constant iterator pointing to the end of the decision variable map (m_pDVContainer) More... | |
| virtual uncertaintiesIterator | uncertaintiesBegin () const |
| Return a constant iterator pointing to the beginning of the uncertain parameter map (m_pUncContainer) More... | |
| virtual uncertaintiesIterator | uncertaintiesEnd () const |
| Return a constant iterator pointing to the end of the uncertain parameter map (m_pUncContainer) More... | |
| map< string, vector< ROCPPConstraintIF_Ptr > >::const_iterator | blockMapBegin () const |
| Return a constant iterator pointing to the begining of the block map. More... | |
| map< string, vector< ROCPPConstraintIF_Ptr > >::const_iterator | blockMapEnd () const |
| Return a constant iterator pointing to the end of the block map. More... | |
| void | add_constraint (ROCPPConstraintIF_Ptr pConstraint, string blockNme="main") |
| Add a constraint into the optimization model after setting the constraint attributes. More... | |
| void | add_soc_constraint (ROCPPVarIF_Ptr coneHead, const vector< ROCPPVarIF_Ptr > &otherVars, string blockNme="main") |
| Add a soc constraint into the optimization model. More... | |
| void | add_constraints (vector< ROCPPConstraintIF_Ptr >::const_iterator first, vector< ROCPPConstraintIF_Ptr >::const_iterator last, string blockNme="main") |
| Add constraints into the optimization model. More... | |
| void | add_constraint_uncset (ROCPPConstraintIF_Ptr pUncCstr, string blockNme="main") |
| Add a constraint defining the uncertainty set into the model. More... | |
| void | add_epigraph () |
| Add an epipragh variable as the objective function and an epigraph constraint into this model. More... | |
| virtual void | add_ddu (ROCPPUnc_Ptr pUncertainty, uint firstTimeStageObservable, uint lastTimeStageObservable, const map< uint, double > &obsCosts) |
| virtual void | set_objective (ROCPPObjectiveIF_Ptr pObj) |
| Set the given objective as the objective function of the model. More... | |
| void | set_objective (ROCPPExpr_Ptr objFun) |
| Create an objective function using the given expression and add it to the optimization model. More... | |
| void | set_objective (vector< ROCPPExpr_Ptr > objFuns) |
| Create an objective function using the given expressions and add it to the optimization model. More... | |
| ROCPPOptModelIF_Ptr | replaceTermWithVar (const multimap< string, ROCPPVarIF_Ptr > &term, ROCPPVarIF_Ptr var) const |
| Replace the given term in this model with the given decision variable. More... | |
| virtual void | set_ddu (ROCPPOptModelIF_Ptr pIn) |
| Copy the information in the given model and set it to this one, make sure the information of ddu is kept after clone or reformulation. More... | |
| virtual void | set_ddu (const map< pair< string, uint >, measPair > &dduToMeasMap, const map< string, pair< uint, uint > > &dduStagesObs) |
| Copy the information in the given maps and set it to this one, make sure the information of ddu is kept after clone or reformulation. More... | |
| virtual void | set_objType (uncOptModelObjType pType) |
| map< string, ROCPPVarIF_Ptr > | createVarMap (ROCPPConstraintIF_Ptr pConstraint) |
| Create the variable map for the given constraint Iterate through all variables in the given constraint. More... | |
| map< string, ROCPPVarIF_Ptr > | createVarMap (ROCPPObjectiveIF_Ptr objFun) |
| Create the variable map for the given objective function Iterate through all variables in the given objective function. More... | |
| virtual map< string, ROCPPUnc_Ptr > | createUncMap (ROCPPConstraintIF_Ptr pConstraint) |
| virtual map< string, ROCPPUnc_Ptr > | createUncMap (ROCPPObjectiveIF_Ptr objFun) |
| virtual void | pair_uncertainties (ROCPPUnc_Ptr u1, ROCPPUnc_Ptr u2) |
| virtual void | getExpectation () |
| Convert the objective function to its expectation. More... | |
| virtual size_t | getNumUncertainties () const |
| virtual bool | isDDU (string uncName) const |
| Return true if and only if the given uncertainty has a time of revelation that is decision-dependent. More... | |
| virtual bool | isObservable (string uncName) const |
| Return true if and only if the given uncertainty is observable. More... | |
| bool | isAdaptive (string varName) const |
| Return true if and only if the variable with the given name is adaptive. More... | |
| bool | isInStandardForm () const |
| Return true if and only if this model does not include a norm term. More... | |
| virtual bool | isUncertainOptimizationModel () const |
| Return true if and only if this model is uncertain. More... | |
| virtual bool | isMultiStageOptModelDDID () const |
| Return true if and only if this model is a ddu model. More... | |
| bool | varIsDefined (string varName) const |
| Return true if and only if the decision variable exists in this model. More... | |
| bool | VarInObj (string varName, uint i=1) const |
| Return true if and only if the decision variable exists in the i th objective function of the max term. More... | |
| virtual ROCPPVarIF_Ptr | getMeasVar (string dduncName, uint timeStage) const |
| Return the measurement variable for the given uncertainty and the time stage. More... | |
| ROCPPVarIF_Ptr | getVar (string varName) const |
| Return the variable called varName. More... | |
| virtual ROCPPUnc_Ptr | getUnc (string uncName) const |
| Return the uncertain parameter called uncName. More... | |
| uint | getNumTimesTermAppears (const multimap< string, ROCPPVarIF_Ptr > &term) const |
| Return the number of times the given term in the map appears in this model. More... | |
| void | getAllProductsOf2Variables (map< pair< string, string >, uint > &freqMap, map< pair< string, string >, multimap< string, ROCPPVarIF_Ptr > > &termMap) const |
| Return all products of two variables in this model. More... | |
| ROCPPObjectiveIF_Ptr | getObj () const |
| Return a pointer pointing to the objective function of this problem. More... | |
| virtual map< pair< string, uint >, measPair > | getDDUToMeasMap () const |
| Return a map from decision dependent uncertain parameters to associated measurement variables. More... | |
| virtual map< string, pair< uint, uint > > | getdduStagesObs () const |
| Return a map from decision dependent uncertain parameters to the stages when the parameter can be observed. More... | |
| virtual uint | getFirstStageObservable (string uncName) const |
| Return the first time stage when uncertainty called uncName can be observed. More... | |
| virtual uint | getLastStageObservable (string uncName) const |
| Return the last time stage when uncertainty called uncName can be observed. More... | |
| ROCPPconstdvContainer_Ptr | getDVContainer () const |
| Return the decision variable container (m_dvContainer) of this object. More... | |
| virtual ROCPPuncContainer_Ptr | getUncContainer () const |
| Return the uncertainty container (m_uncContainer) of this object. More... | |
| virtual uncOptModelObjType | getObjType () const |
| Return the objective type. More... | |
| size_t | getNumConstraints () const |
| Return the number of constraints in the model. More... | |
| uint | getNumTimeStages () const |
| Return the time stage of the model. More... | |
| uint | getNumContVars () const |
| Return the number of real-valued decision variables in this term. More... | |
| uint | getNumIntVars () const |
| Return the number of integer decision variables in this term. More... | |
| uint | getNumBoolVars () const |
| Return the number of boolen decision variables in this term. More... | |
| uint | getNumAdaptiveContVars () const |
| Return the number of adaptive real-valued decision variables in this term. More... | |
| uint | getNumAdaptiveVars () const |
| Return the number of adaptive decision variables in this term. More... | |
| size_t | getNumVars () const |
| Return the number of decision variables in this term. More... | |
| bool | hasNonlinearities () const |
| Return true if and only if there is a product between two decision variables in this optimization model. More... | |
| virtual bool | hasRectangularUncertaintySet () const |
| Return true if the problem has rectangular uncertainty set. More... | |
| virtual bool | hasRealVarsInUncertaintySet () const |
| virtual bool | hasDecisionDependentUncertaintySet () const |
| virtual ROCPPOptModelIF_Ptr | Clone () const |
| Clone this problem. More... | |
| virtual void | WriteToFile (string folderName, string fileName) const |
Additional Inherited Members | |
| Public Types inherited from OptimizationModelIF | |
| typedef vector< ROCPPConstraintIF_Ptr >::const_iterator | constraintIterator |
| Constant iterator for optimization model constraints. More... | |
| typedef dvMapType::const_iterator | varsIterator |
| Constant iterator for optimization model decision variable map. More... | |
| typedef map< string, ROCPPUnc_Ptr >::const_iterator | uncertaintiesIterator |
| Constant iterator for optimization model uncertain parameter map. More... | |
| Protected Member Functions inherited from OptimizationModelIF | |
| virtual void | add_var (ROCPPVarIF_Ptr pVariable) |
| Add the given variable into the dvContainer of this model. More... | |
| virtual void | add_vars (ROCPPconstdvContainer_Ptr pDVcontainer) |
| Add the variable in the given container into the dvContainer of this model. More... | |
| void | add_ddu_obj (ROCPPVarIF_Ptr pVar, double cost) |
| Add the information discovery cost to the objective model. More... | |
| void | push_constraint (ROCPPConstraintIF_Ptr pConstraint) |
| Push the constraint back into the vector of constraints of this model. More... | |
| ptrdiff_t | getConstraintIdx (constraintIterator pConstraintIt) const |
| Get index of the given constraint in the m_mapCstrIdxToUncertaintySet map. More... | |
| Protected Attributes inherited from OptimizationModelIF | |
| uint | m_numTimeStages |
| Length of planning horizon of this model. More... | |
| vector< ROCPPConstraintIF_Ptr > | m_uncertaintySet |
| Vector collecting the uncertainty set constraints of this model. More... | |
| ROCPPuncContainer_Ptr | m_pUncContainer |
| Uncertain parameter container of this model. More... | |
| ROCPPuncContainer_Ptr | m_dduContainer |
| Container of decision dependent uncertain parameters in this model. More... | |
| ROCPPuncContainer_Ptr | m_nondduContainer |
| Container of non decision dependent uncertain parameters in this model. More... | |
| map< string, measPair > | m_measVars |
| Map from measurement varaibles to measurement pairs. More... | |
| map< pair< string, uint >, measPair > | m_dduToMeasMap |
| Map from pair of uncertain parameter name and time stage to measurement pair. More... | |
| map< string, pair< uint, uint > > | m_dduStagesObs |
| Map from name of the uncertain parameter to the first and last times when it can be observed. More... | |
| map< string, vector< ROCPPConstraintIF_Ptr > > | m_mapBlockConstraints |
| Map from block name to vector of problem constraint indices. More... | |
Deterministic optimization model.
|
inline |
Constructor of the DeterministicOptimizationModel class.
|
inline |
Destructor of the DeterministicOptimizationModel class.
|
virtual |
Reimplemented from OptimizationModelIF.
Reimplemented in CPLEXMISOCP, Bilinear_MISOCP, and MISOCP.
|
virtual |
Reimplemented from OptimizationModelIF.
Reimplemented in CPLEXMISOCP, Bilinear_MISOCP, and MISOCP.
|
virtual |
Reimplemented from OptimizationModelIF.
Reimplemented in CPLEXMISOCP, Bilinear_MISOCP, and MISOCP.
|
inlinevirtual |
Return the problem type.
Implements OptimizationModelIF.
Reimplemented in CPLEXMISOCP, Bilinear_MISOCP, and MISOCP.